












Strefa Katedry
Baza naukowo-badawcza
Laboratorium systemów pneumatronicznych LSP, s. 103HB, 113HB
Kierownik
dr Jakub Takosoglu
Wykaz aparatury będącej na wyposażeniu laboratorium:
- Stanowisko badawcze PT-2.
- Stanowisko badawcze PT-3.
- Stanowisko badawcze PT-6.
- Stanowisko badawcze PT-7.
- Elektropneumatyczne układy sterowania.
- Trzyosiowy manipulator elektropneumatyczny ze sterownikiem SPC-200.
- Robot RIMP 401.
- Robot PR-02 firmy PIAP.
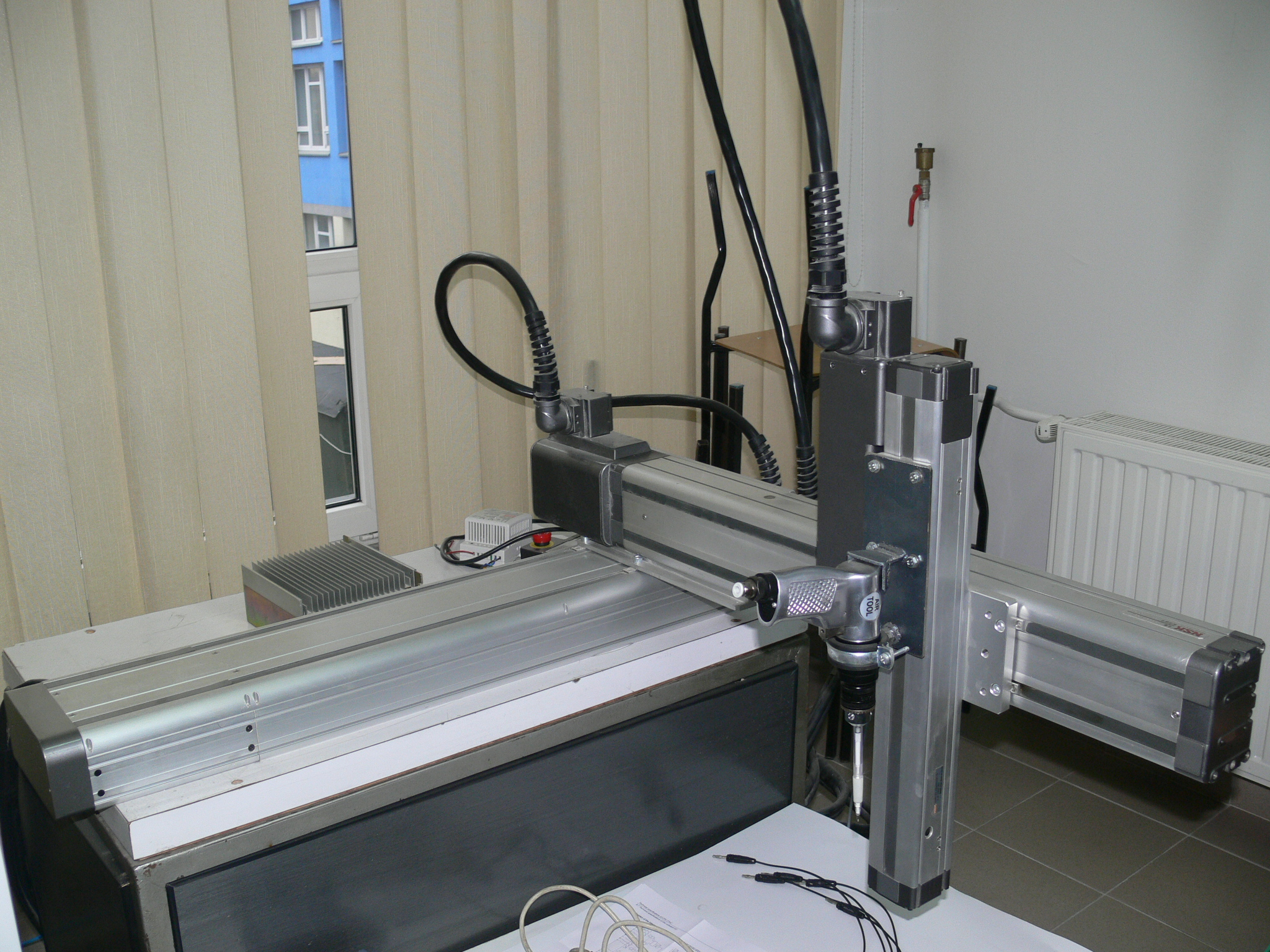
- Robot kartezjański firmy NSK.
- Serwonapęd elektropneumatyczny ze sterowaniem rozmytym.
- Manipulator elektropneumatyczny typu tripod.
- Stanowisko do wyznaczania charakterystyk przepływowych z przepływomierzami U70 firmy Setaram i Sensyflow D firmy ABB.
- Kamera termograficzna VIGOcam v50 firmy VIGO System S.A.
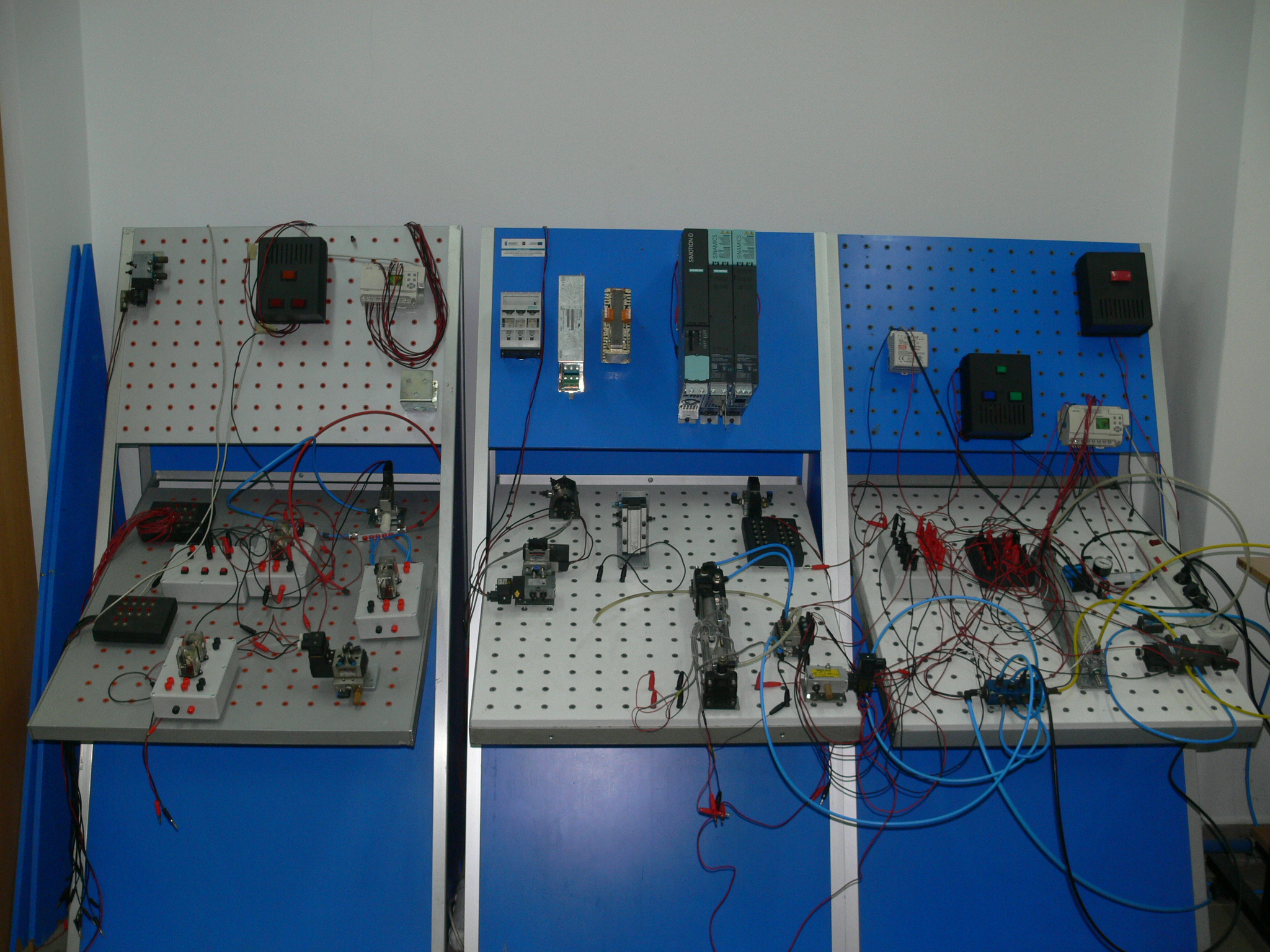
- Zestaw sterowników programowalnych PLC i przekaźników programowalnych(Siemens S7-1200, S7-300, Telmatik AF).
- Sterownik serwonapędów elektrycznych Simotion D firmy Siemens.
- Systemy czasu rzeczywistego dSpace oraz xPC Target.
- Karty AC/CA PCI oraz USB firmy Measurement Computing.
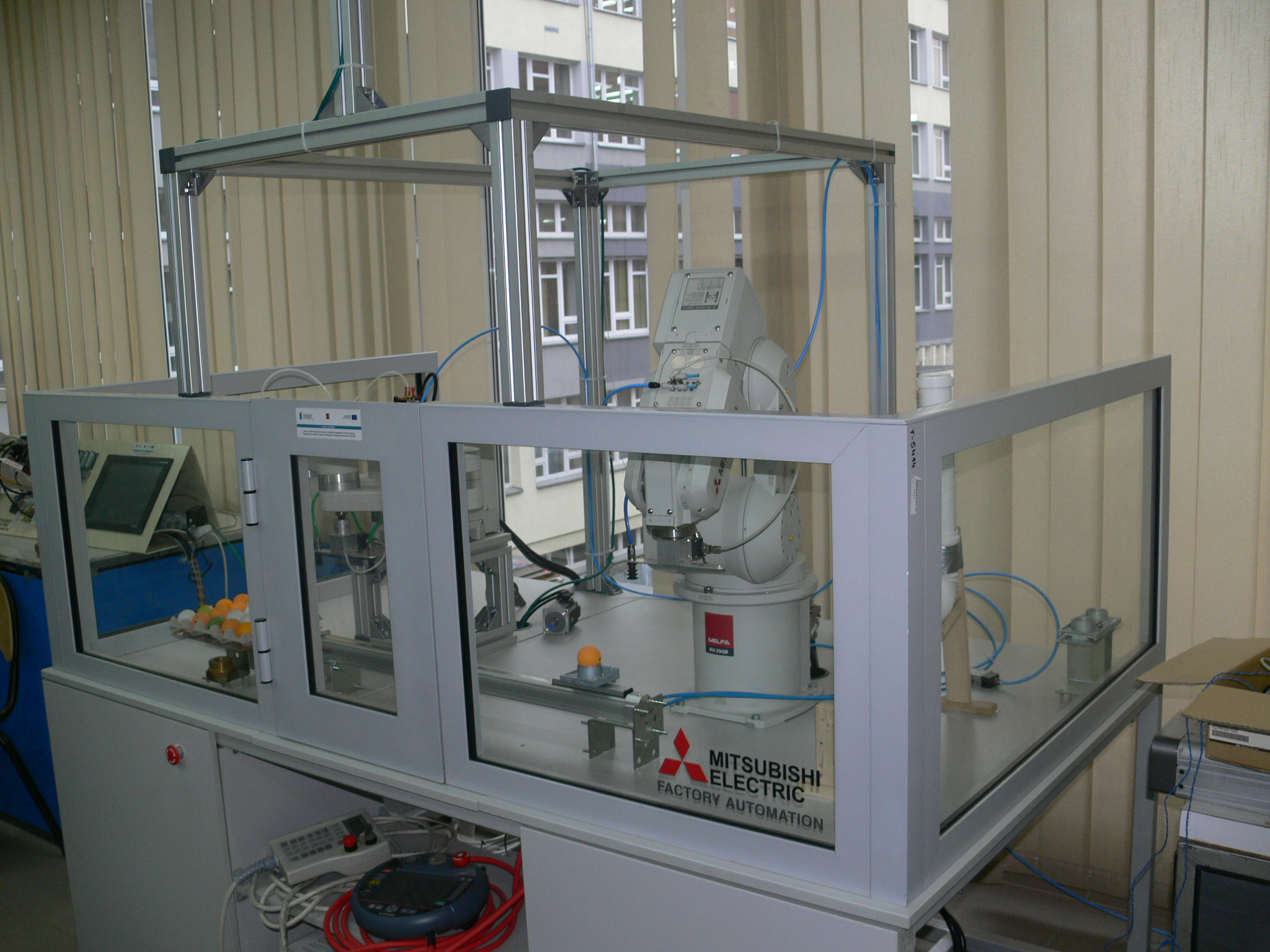
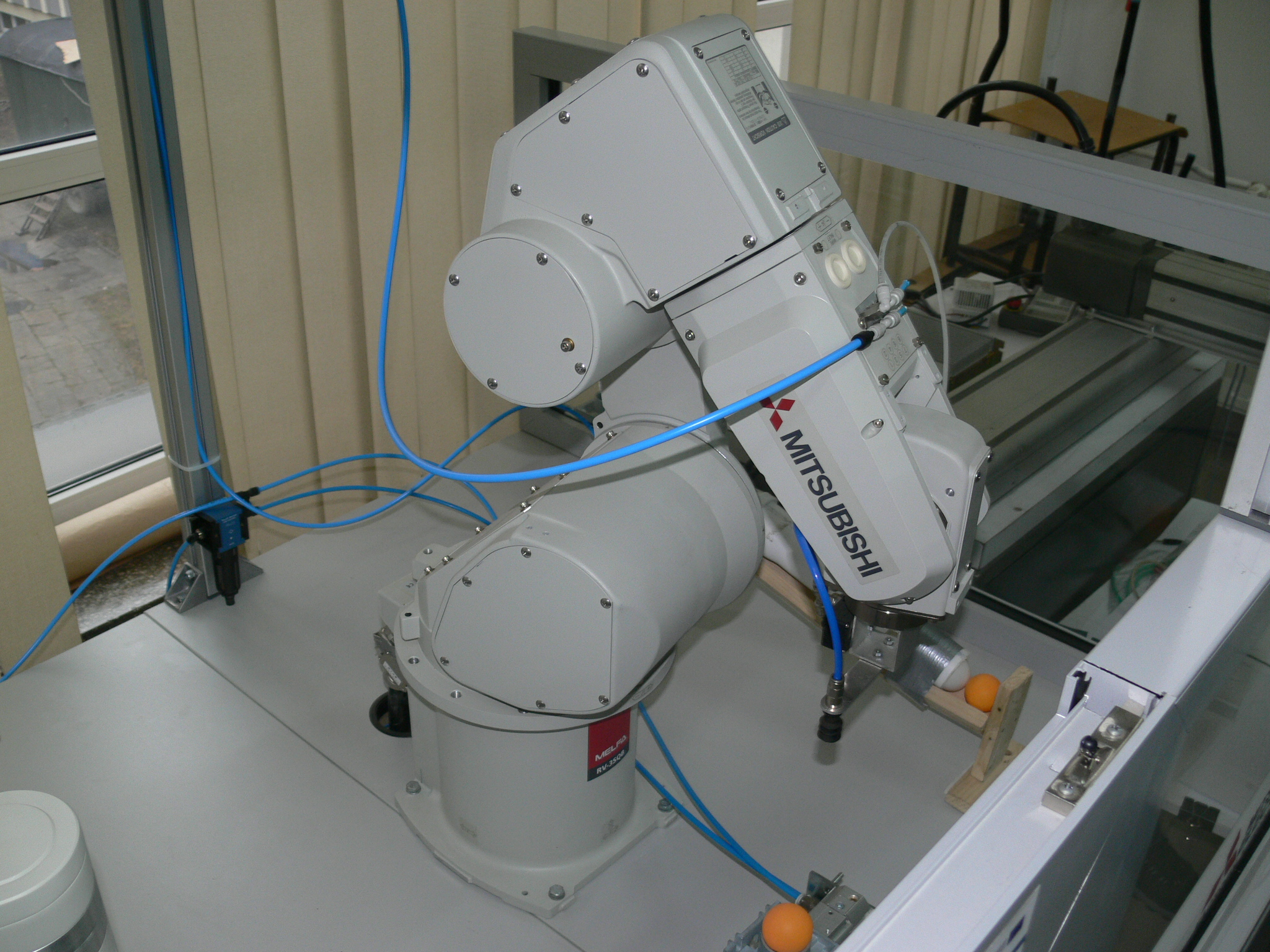
- System mechatroniczny realizujący złożony proces automatyzacji produkcji zawierający szeregowy robot 6-osiowy RV-3SQB firmy Mitshubishi, równoległy robot RH-5AH firmy Mitshubishi, system wizyjny INSIGHT 1100C firmy Cognex.
- Zestaw cyfrowych przetworników pomiarowych do urządzeń automatyki i robotów.
- Zestaw aktuatorów, sensorów i elementów sterujących do układów pneumatronicznych.
- Modułowe komputery mobilne.
- Aktuator piezo.
- Stanowiska FAP.
- Profesjonalne programy do symulacji i wizualizacji przepływu w systemach płynowych: SolidWorks, FluidSimP, FluidSimH, AutomationStudio, Matlab/Simulink, DasyLab.
Zakres prac możliwych do wykonania
a) prace naukowo-badawcze
- standardowe, zaawansowane, inteligentne i energooszczędne układy sterowania pneumatycznego i elektropneumatycznego,
- analiza, synteza, powtarzalność i dokładność pozycjonowania jedno i wieloosiowych serwonapędów elektropneumatycznych o strukturach kinematycznych szeregowych, równoległych i hybrydowych,
- dynamiczne pomiary temperatury i rozkładu temperatury kamerą termograficzną,
- szybkie prototypowanie sterowania i symulacje hardware in the loop w systemach czasu rzeczywistego,
- pomiary wartości napięcia, natężenia prądu, mocy, wilgotności, ciśnienia, natężenia przepływu, temperatury, siły, przemieszczenia, prędkości, akwizycja danych w układach pneumatronicznych i mechatronicznych,
- bezprzewodowy system sterowania serwomechanizmu elektropneumatycznego z wykorzystaniem modułowego komputera mobilnego,
- badania symulacyjne i projektowe układów pneumatronicznych i mechatronicznych w oprogramowaniu naukowo-technicznym,
b) prace pod kątem współpracy z podmiotami gospodarczymi
- pomiar czasu odpowiedzi zaworów rozdzielających,
- badania trwałości zaworów rozdzielających,
- wyznaczanie wytrzymałości na ciśnienie próbne, wyznaczenie minimalnego ciśnienia ruszenia tłoka siłownika, sprawdzenie szczelności wewnętrznej i zewnętrznej siłowników,
- wyznaczania wytrzymałości na ciśnienie próbne elementów zespołów przygotowania powietrza,
- automatyzacja procesów przemysłowych z wykorzystaniem systemów pneumatronicznych (napędów, manipulatorów i robotów, systemu wizyjnego),
- automatyzacja procesów przemysłowych z wykorzystaniem systemów mechatronicznych (serwonapędów, sterowników PLC, manipulatorów i robotów, systemu wizyjnego),
- wyznaczanie przepływu masowego, parametrów przepływowych i rodziny charakterystyk przepływowych elementów pneumatycznych i elektropneumatycznych,
- diagnostyka niesprawności sterowania i napędów pneumatycznych i elektropneumatycznych,
- dynamiczne pomiary temperatury i rozkładu temperatury kamerą termograficzną,
- szybkie prototypowanie sterowania i symulacje hardware in the loop w systemach czasu rzeczywistego,
- pomiary wartości napięcia, natężenia prądu, mocy, wilgotności, ciśnienia, natężenia przepływu, temperatury, siły, przemieszczenia, prędkości, akwizycja danych w układach pneumatronicznych i mechatronicznych,
- badania symulacyjne i projektowe układów pneumatronicznych i mechatronicznych w oprogramowaniu naukowo-technicznym.
|

|

|
|
|
|
|